针对远洋货轮船体巡检场景,用 Figma 设计的完整任务驾驶舱概念。覆盖任务执行的完整生命周期:实时画面与 AI 分析、多机编队地图调度、巡检完成后的缺陷报告与传感器汇总。每个模块都对应实际作业中的决策节点。

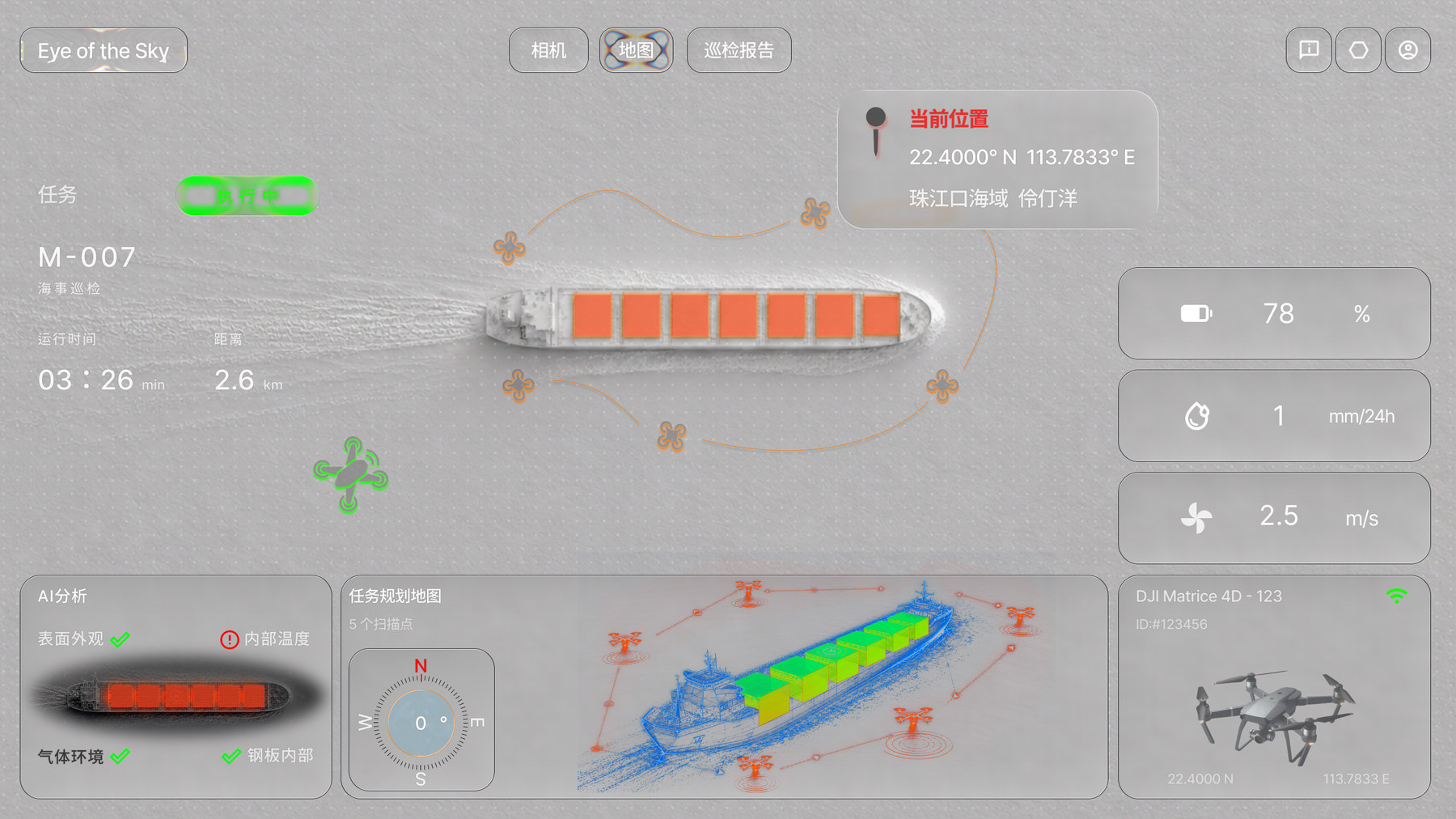
实时相机画面叠加目标船舶信息弹窗,底部同步显示 AI 分析结果(表面外观 / 气体环境 / 钢板内部)与任务规划地图,飞行员可在单屏内完成态势感知与任务监控。
⚠ 此为 Figma 原型设计,展示设计思路与行业理解,尚未接入真实无人机硬件或后端服务。
A1 / Sensors
多传感器融合显示
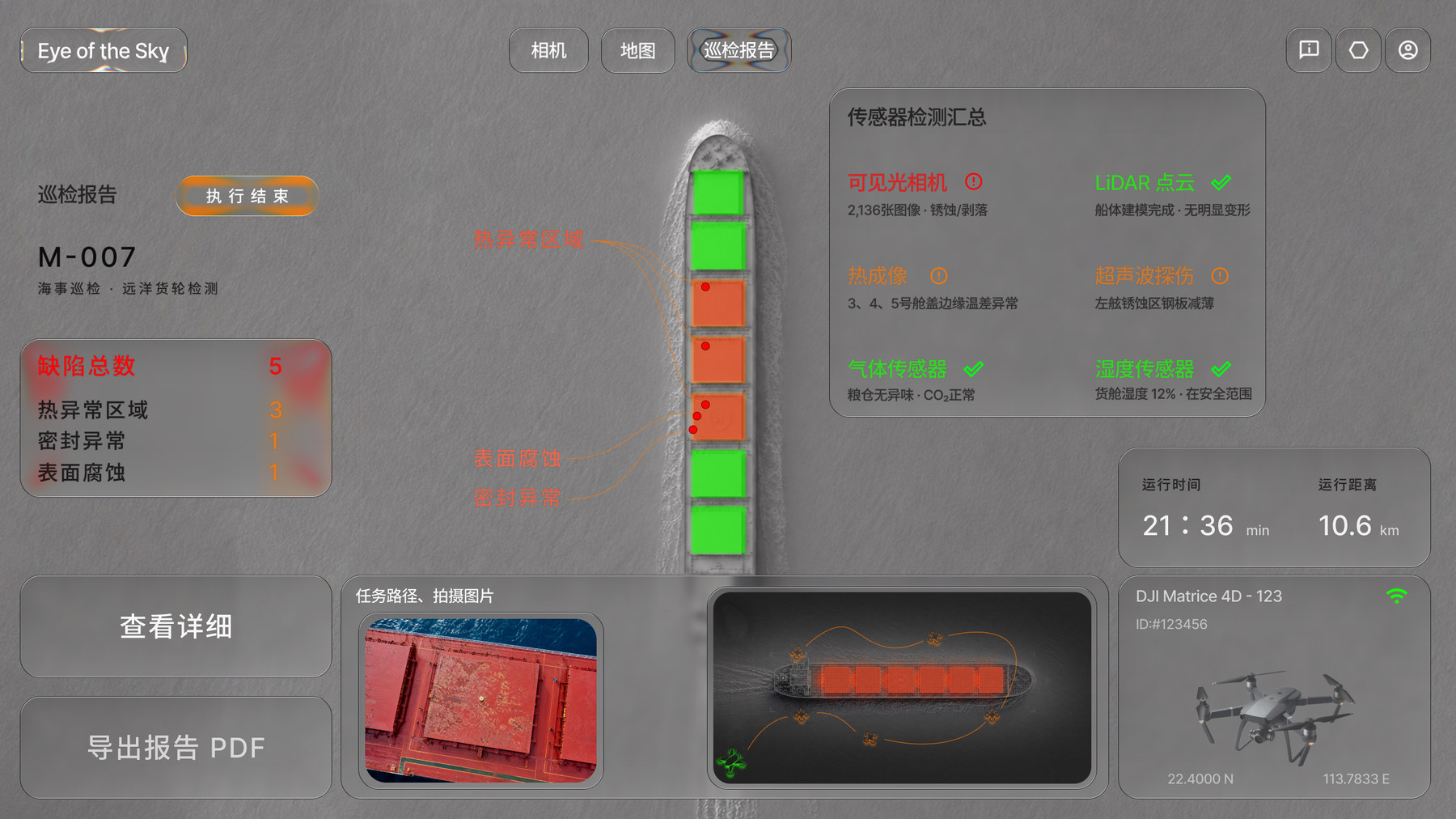
可见光、热成像、LiDAR 点云、超声波探伤、气体传感器、湿度传感器六路数据在报告页统一呈现,对应真实货轮检测流程中的标准传感器配置。
A2 / AI Defect
AI 缺陷识别可视化
巡检报告以热异常区域 / 密封异常 / 表面腐蚀三类缺陷分类显示,并在船体俯视图上标注具体位置,方便后续人工复核与维修定位。
A3 / Lifecycle
完整任务生命周期
三个视图分别覆盖「执行中」「调度中」「已结束」三个任务阶段,驾驶舱逻辑完整,不是单屏截图拼凑,而是有内在交互逻辑的系统设计。