Selected Works · 01
浏览全部作品
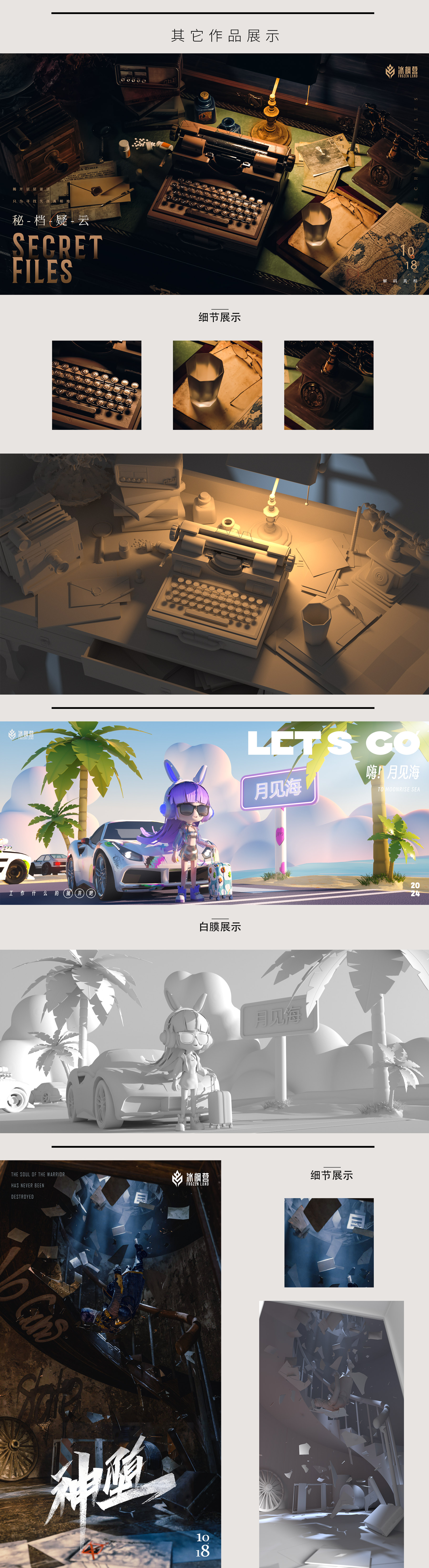
最近做的东西。



本科读环境艺术设计。毕业后没有直接进甲方乙方,而是先去冰枫营做了 8 个月全流程视觉创意的系统训练——三维、排版、字形、AIGC 都从临摹和拆解开始练。
之后在两家公司工作。在东溯纸品做 AI 设计师,把 ComfyUI + LoRA 训练做成可以批量交付的视觉产线,日均稳定输出 30+ 张商用素材。在福华无人机做技术员的同时,独立完成了公司产品手册重制,并把内部 AI 调度系统从立项做到上线。
下一步想把这套「设计判断 + AI 流水线 + 三维呈现 + UI 思维」的方法继续在更成体系的团队里打磨。能落地、能复用、能被使用,是我自己最在意的三件事。
按"白膜 → 材质 → 光影 → 后期"流程独立完成游戏视觉级三维场景。能稳定输出构图、氛围、镜头语言一致的整组成片。
独立设计完整任务驾驶舱的多视图 UI 系统(实时画面 / 地图 / 报告三屏),按用户决策路径组织信息层级,不只是把数据摆出来。
中秋 / 端午等节庆礼盒装饰元素与提案。从创意提案、刀版展开到三维效果完整交付,理解印刷规范与材质工艺。
在 Midjourney / WebUI 做发散,转 ComfyUI 搭建可复用工作流,训练 LoRA 与 Personalization 适配客户样稿。把"灵感"做成"可重复批量交付"的产线。
摄影是我自我训练的方式:练"先看见,再决定"。从光线、构图、距离开始反推所有设计判断的底层。
设计合作、岗位机会、AI 工作流交流都欢迎。扫码加我微信,备注来意即可。